开始使用
本章介绍平台的快速使用方法,如果您对ROS系统和Ubuntu系统不熟悉,请先阅读第二章的教程一。
设置网络
首先将小强的主机连接上电脑显示器(小强pro用户请利用附赠的HDMI到VGA转接头进行连接, 小强mini用户请直接使用vga)。小强的默认密码是xiaoqiang,请及时更改默认密码。进入系统设置好小强的wifi网络连接。推荐设置路由器使小强使用静态ip,静态IP设置方法,方便以后连接。
产品组装
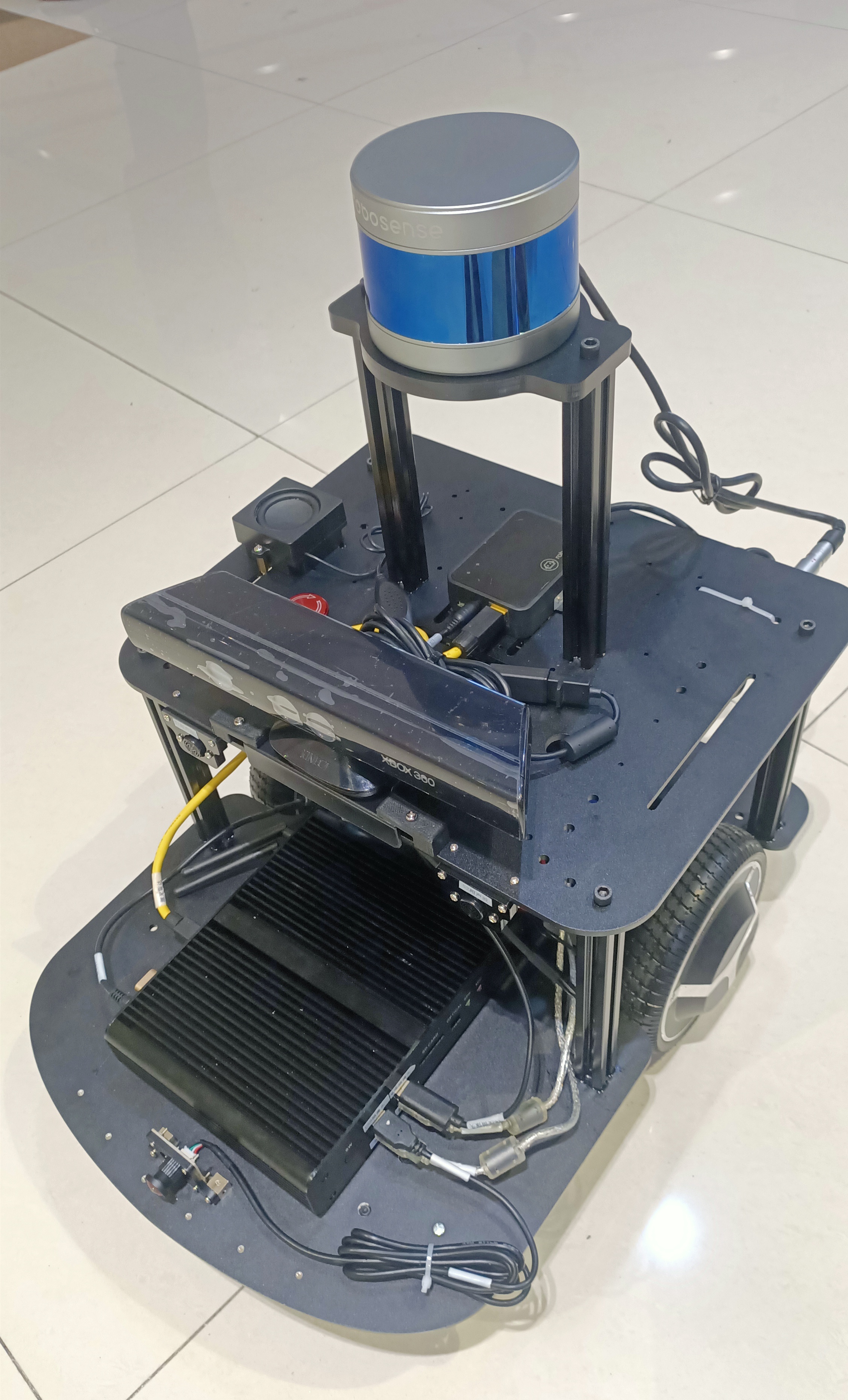
小强的主要部分如下图所示

将电池平放在主机前方空余区域(电池靠两个小黑块堵住),根据线标提示接上底盘电源线,安装好电脑主机wifi天线,摄像头和底层USB连接模块连接上主机的USB接口即可。
注意在长时间不使用小车的时候,请将电池断开连接,避免因为电池过放产生问题。
xq5 的组装图如下
远程连接
机器人默认安装了VNC远程桌面程序,用户可以方便的通过远程访问机器人系统。

安装软件后在软件的地址栏输入机器人ip地址即可访问。vnc密码和用户密码一样都是xiaoqiang。
状态检查
组装完成之后就可以开始使用小强了。打开小强主机开关,等待主机蓝色灯亮起。小强左侧电源数据显示正常(电池电压合理使用范围是10V以上,当电池电压小于10V时小强会自动关机)。
通过VNC远程连接,然后打开命令行终端(可以通Ctrl + Alt + T快捷键打开)。
检查程序是否正常运行,执行以下指令
bwcheck
这个指令会自动进行机器人软件和硬件的自检。正常输出如下
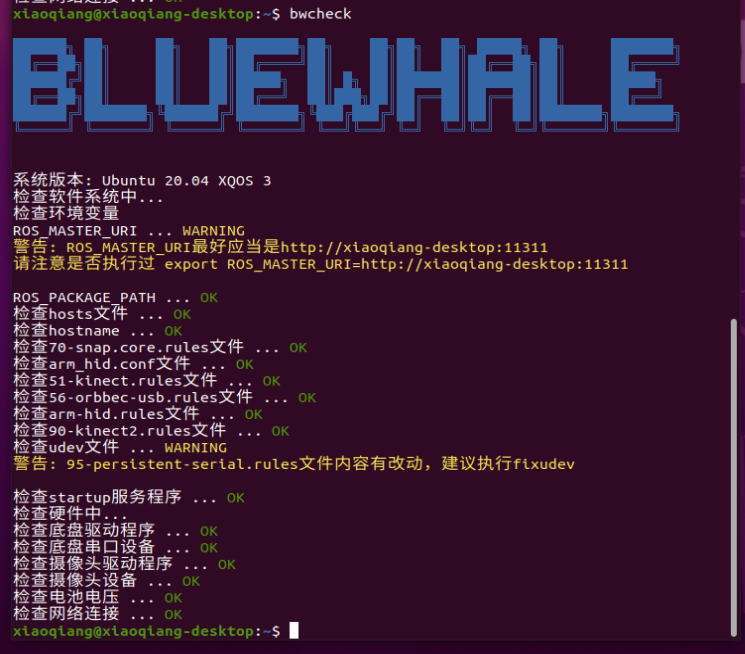
根据硬件不同以上的程序输出可能不一样。黄色的警告可以忽略,红色的错误一般是比较重要的信息。可以根据错误信息对机器人进行调整。
远程遥控
远程遥控可以通过机器人客户端进行操作。客户端的下载和使用参见此教程。在开始进行开发前,建议先通过此教程了解和熟悉机器人的完整功能。
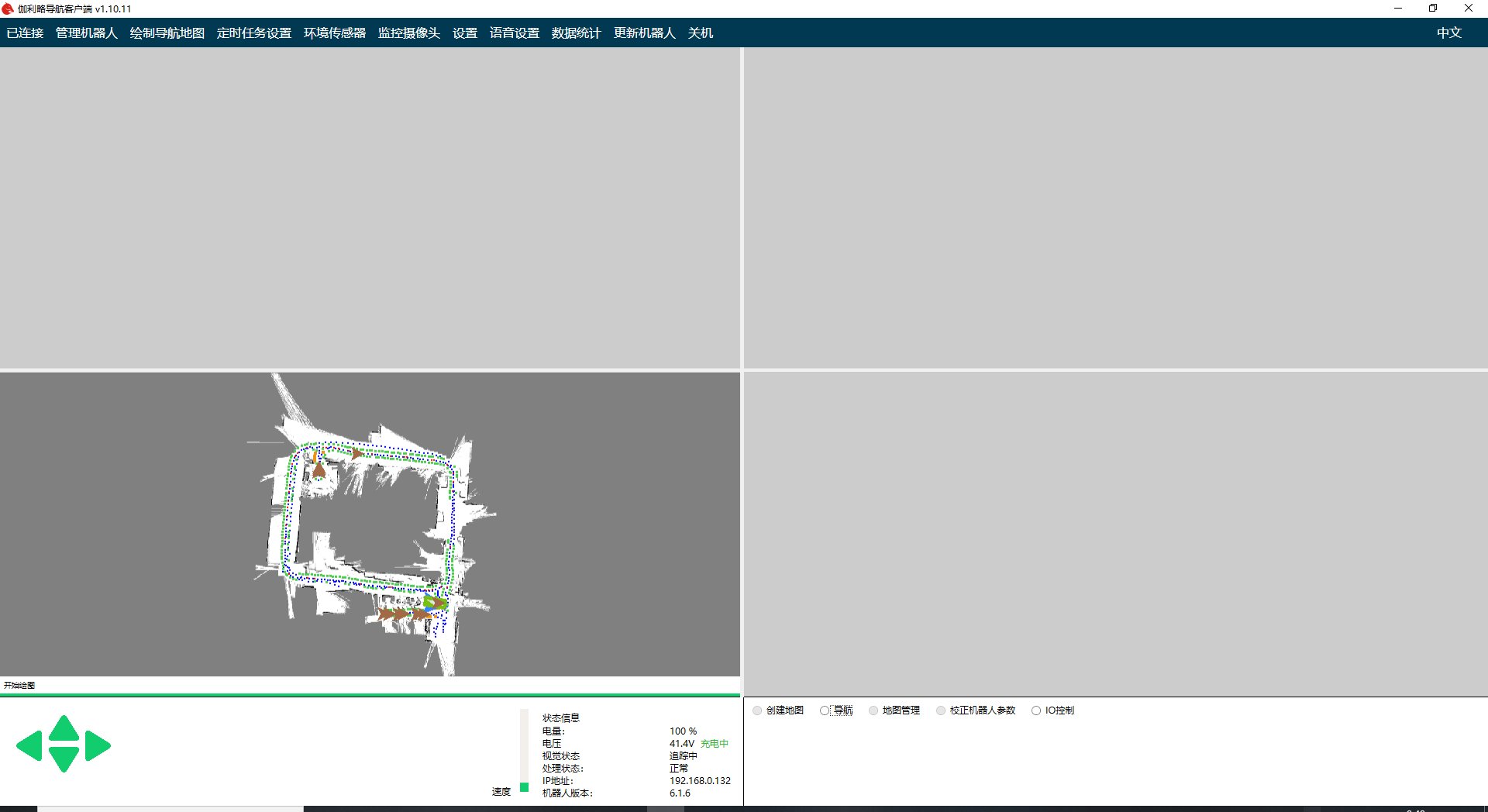
安装完成后,点击客户端左上角连接按钮,连接机器人。连接完成后可以通过WASD进行前后左右的遥控操作。可以多个按键同时操作以方便控制移动。上下方向键调整机器人速度。
如果发现机器人不能移动且之前的自检指令提示正常,则机器人可能触发避障。检查机器人红外传感器是否在亮,超声波传感器是否被阻挡,以及机器人急停按钮是否被按下。
软件整体结构和说明
小强的软件构建于ROS之上。程序主要包含有底层驱动,导航算法,slam算法。 对于机器人来说,软件是一个整体,各部分的依赖程度都比较高。为了方便管理,系统中的基础功能用一个service统一操作。也就是前文中提到的startup service。这个service会启动底层的驱动软件包和摄像头。 startup软件包位于/home/xiaoqiang/Documents/ros/src/startup。系统启动时会自动启动这个服务。如果想要更改这个服务的内容,可以修改这个软件包内的launch文件。具体的操作请参照这里。 系统的导航程序采用的是ROS自带的导航程序包。不过导航参数是根据小强自己的参数修改过的。导航参数对导航的性能表现影响很大,你也可以尝试自己修改参数以提高表现。
ROS入门手册
Learning ROS for Robotics Programming - Second Edition.pdf。这本教程很基础、很全面,虽然以Hydro版本为例,但是也完全兼容kinetic,noetic版本,代码实例中只需将书中的Hydro字符串替换成即可。请重点阅读本书的第二章和第三章。