小强ROS机器人教程(3)_在rviz中显示小强机器人模型
实时显示机器人当前姿态是一件很酷的事情,在ROS中借助rviz可以轻松实现这个目标。先看最后的 效果
小强模型的软件包在Documents/ros/src/xiaoqiang_udrf
也可以到我们的开源仓库去下载 Github
# 将小强主机接入显示器和键盘,开机后,打开终端
# 先关闭开机任务
sudo service startup stop
roscore
# 在小强主机上新开一个终端,启动这个软件包
roslaunch xiaoqiang_urdf display.launch
注意这个过程需要图形化操作,所以没办法通过远程ssh连接操作。如果一定要ssh连接,可以在连接时加上-X(注意是大写的)选项,但是效果不好,并不推荐。推荐通过VNC进行操作。VNC的安装方法可以参照这篇文章
如果是远程打开模型包,需要先在本地安装xiaoqiang的模型包。对于使用xiaoqiang镜像系统的用户,xiaoqiang的模型包已经提前安装好。
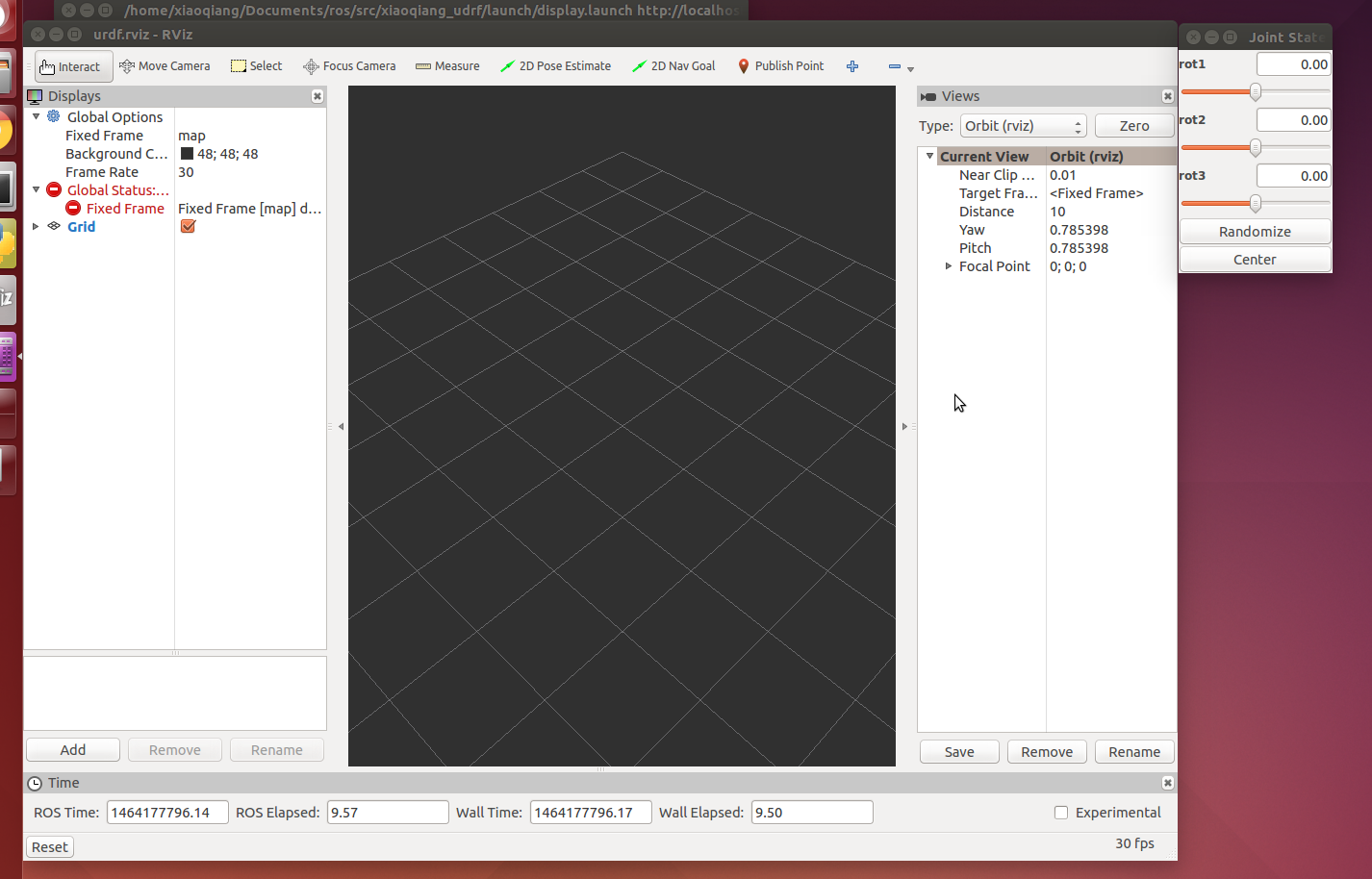
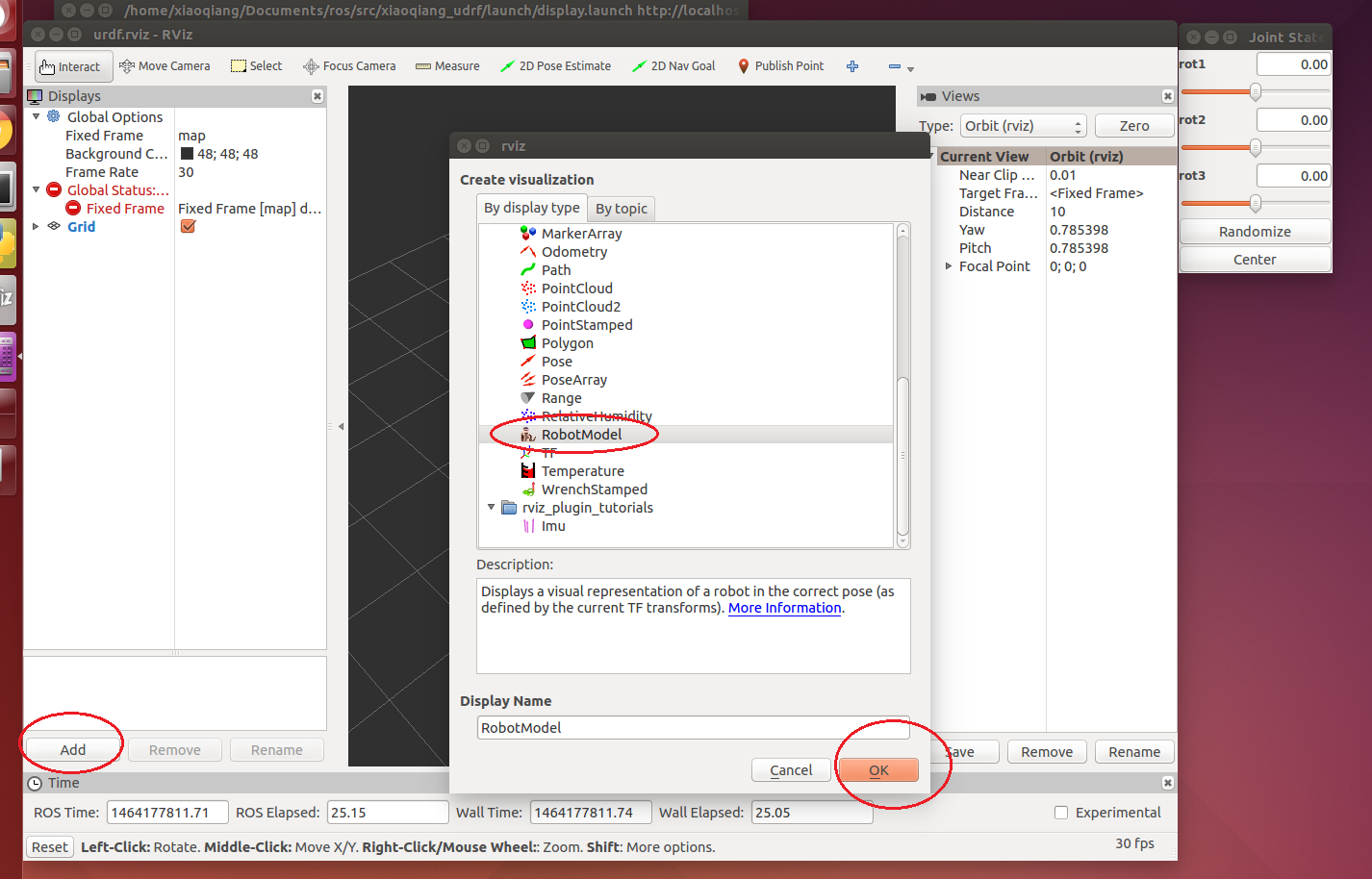
此时发现没有任何显示,需要添加rviz显示项目
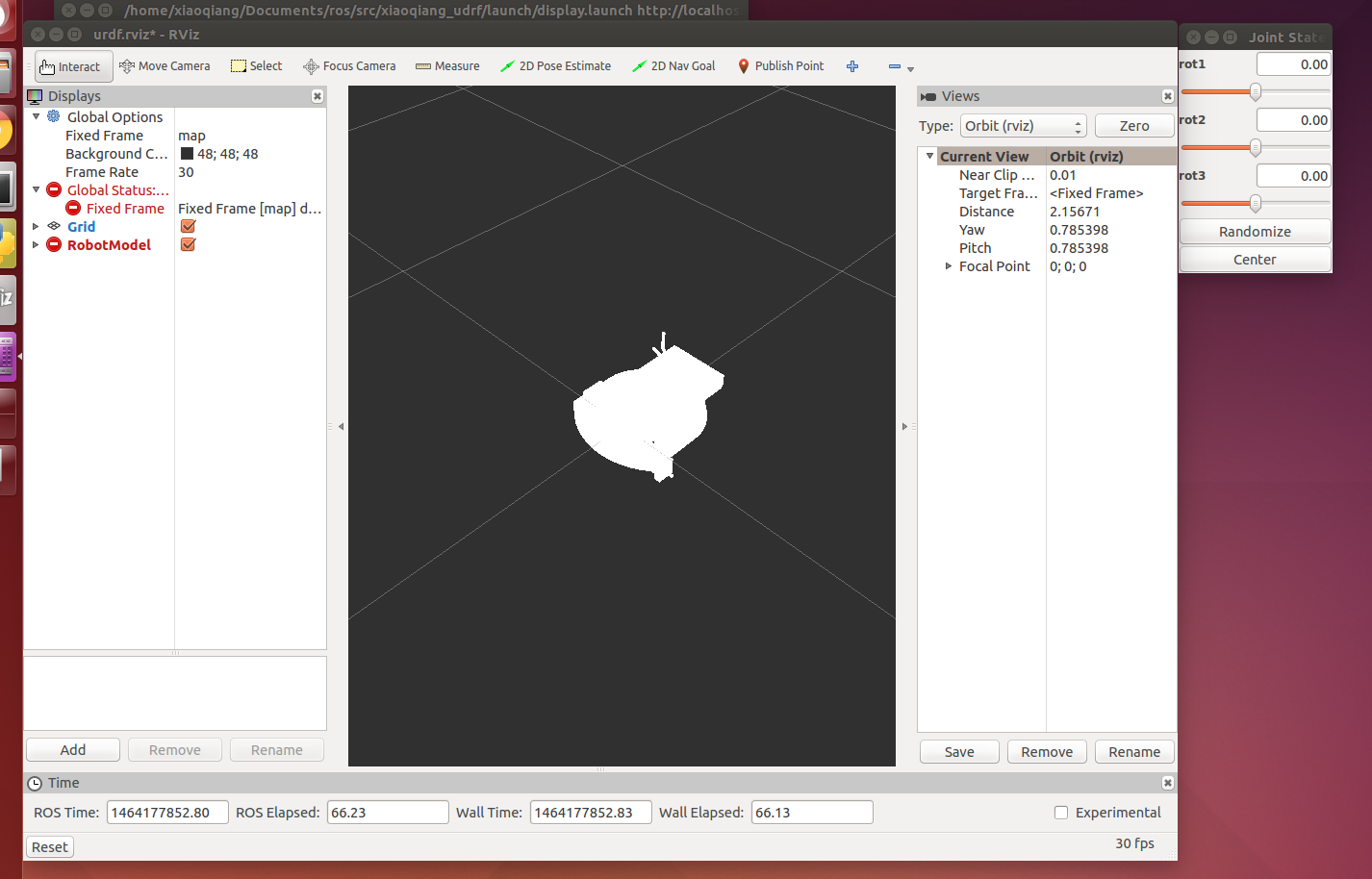
还是有问题,整个模型透明发白,这是因为rivz中的全局坐标系“fixed frame”设置的不合适,将map改成base_link后即可正常显示

现在操作右上角的滑动条就可以使相应的轮子转动,over!
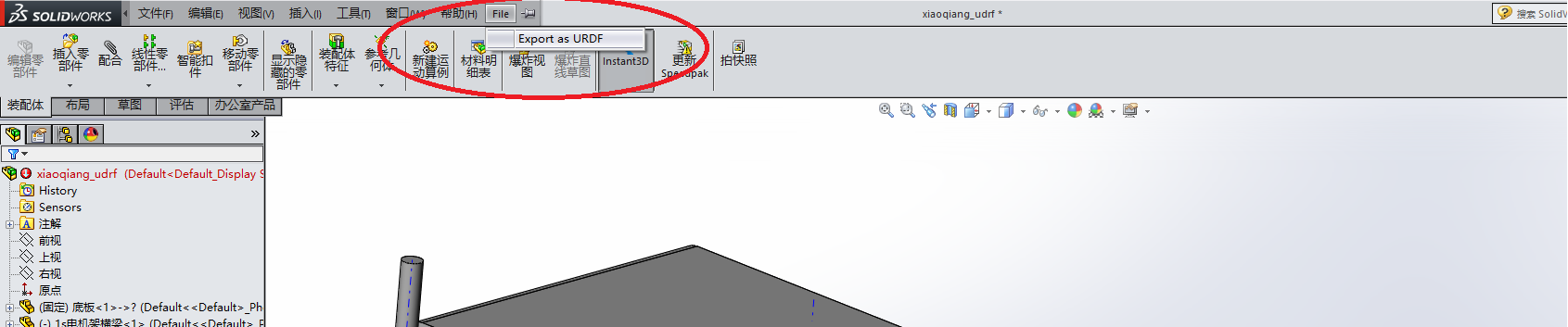
上面我们简单演示了rviz显示udrf模型的使用方法,下文将详细介绍在windows系统下用solidworks制作udrf模型的整个过程。
先用solidworks 建立小车模型,并下载安装好solidwork转udrf插件下载地址. 制作好模型后,需要补加一个坐标系,这个坐标系在下文将作为整个udrf模型的基准坐标系(即ROS中的base_link frame)。
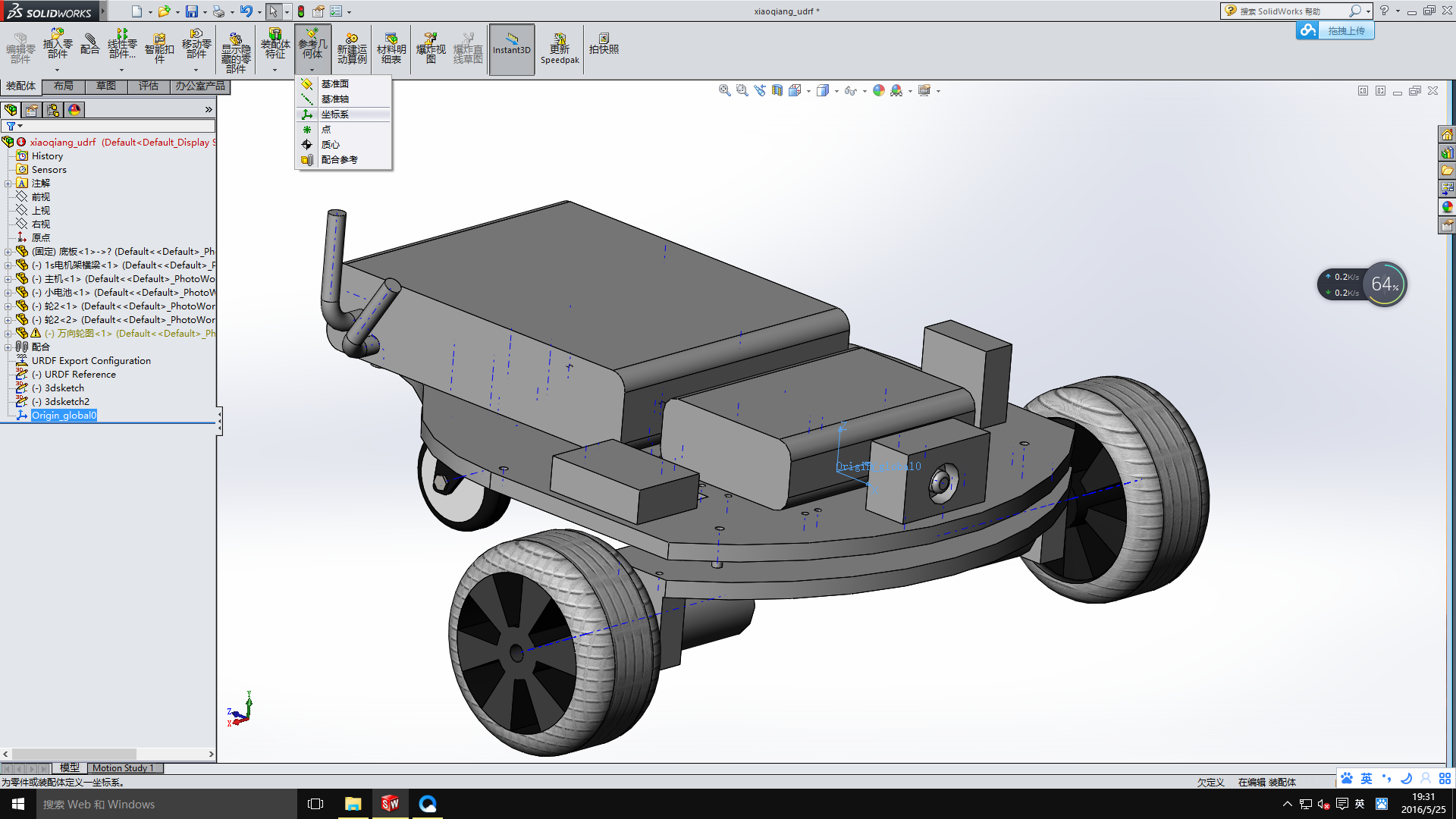
打开udrf插件
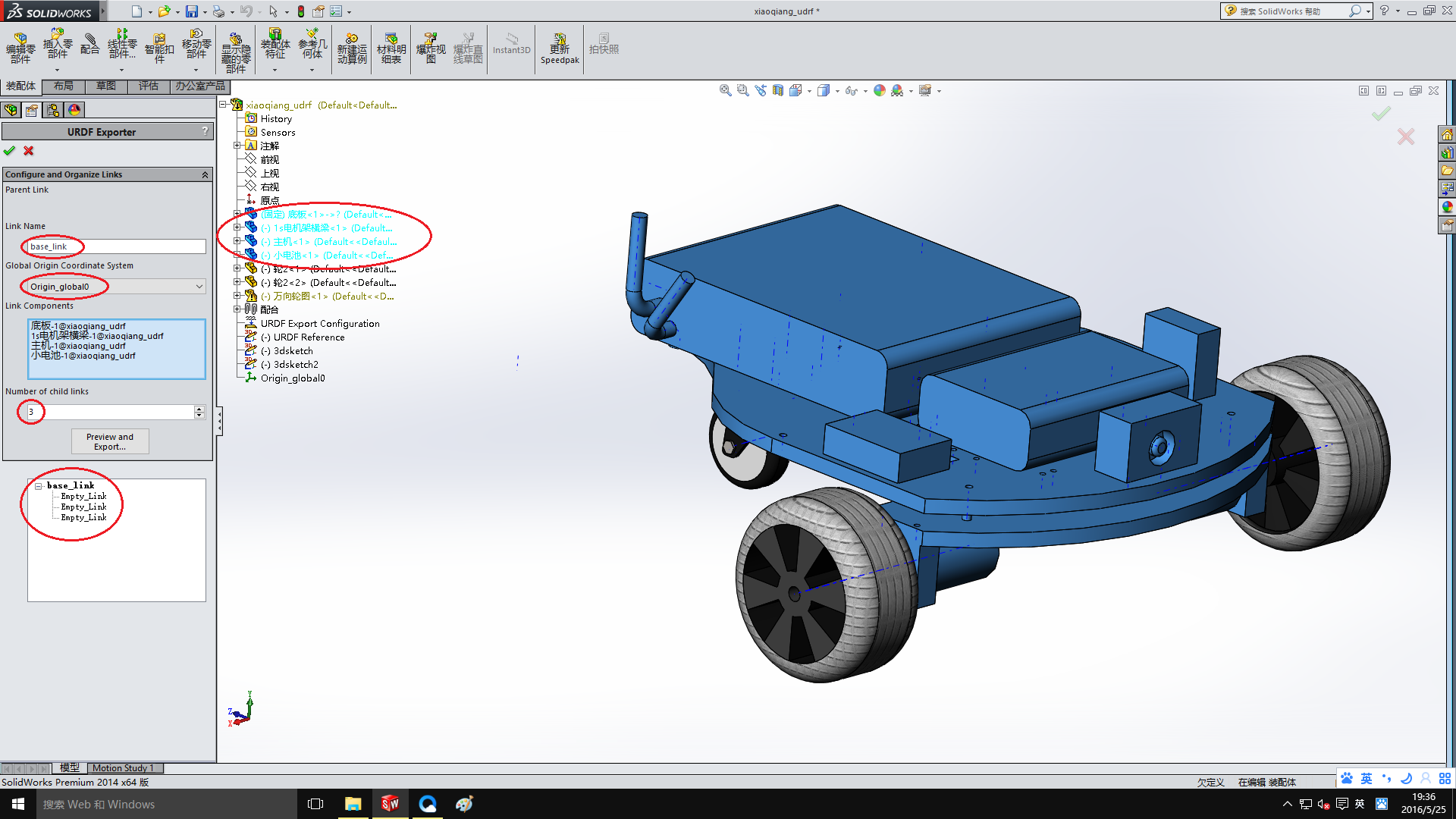
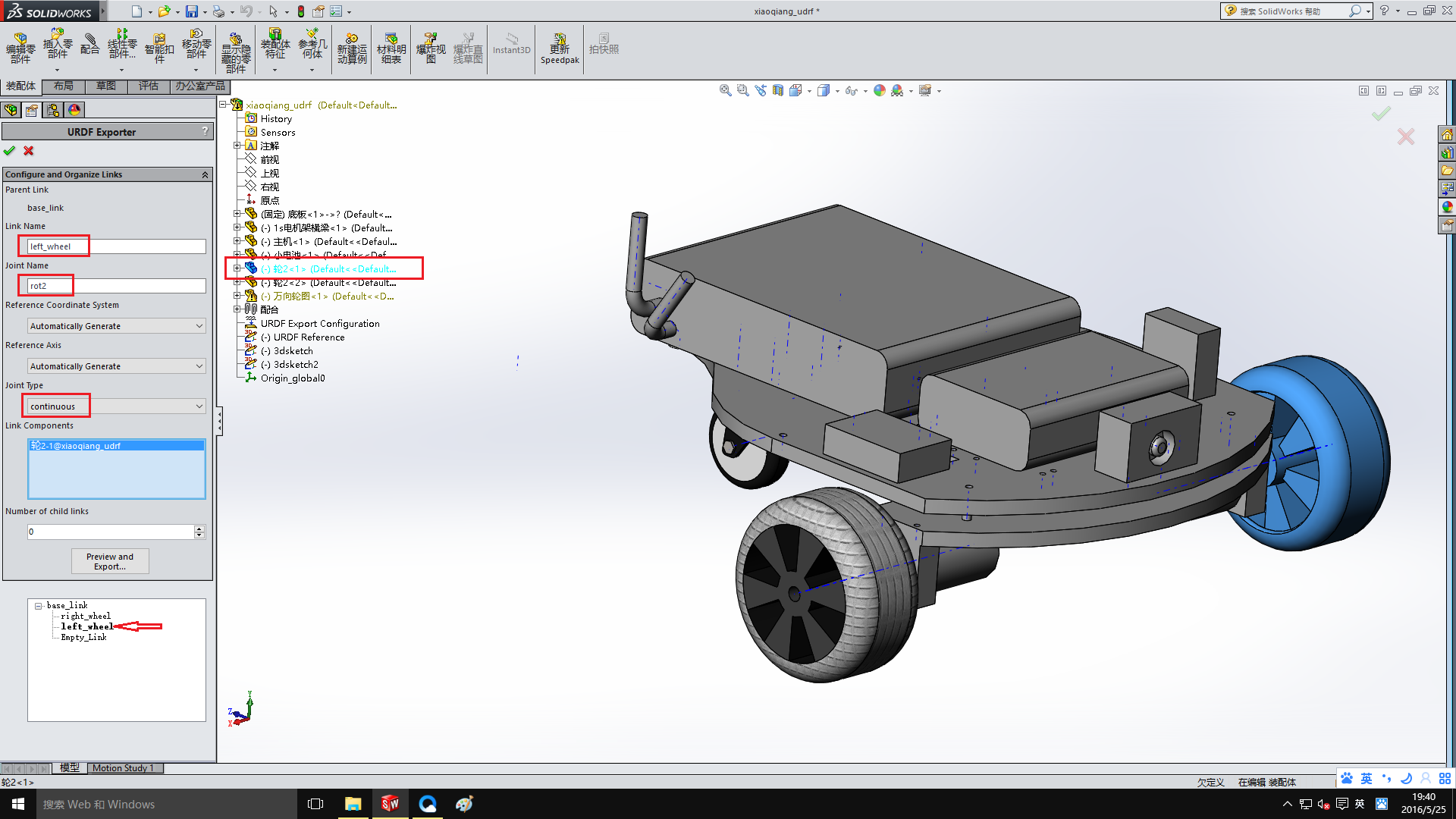
小强有两个驱动轮和一个从动轮,所以整个模型需要3个link,3个joint.首先编辑base_link,留意上文中全局坐标系,图片中红色区域就是需要自己点击或者修改的项目
然后是右轮
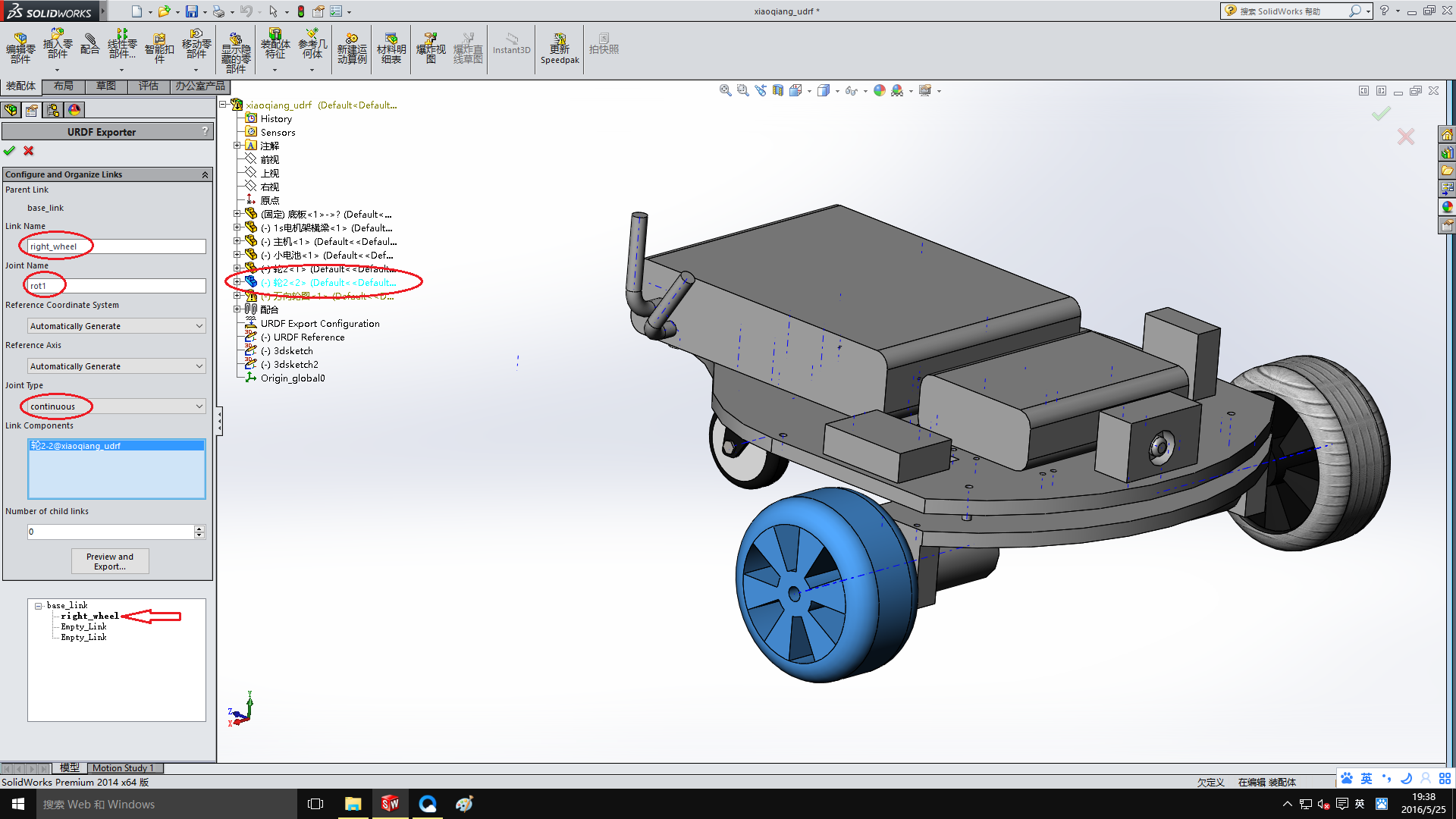
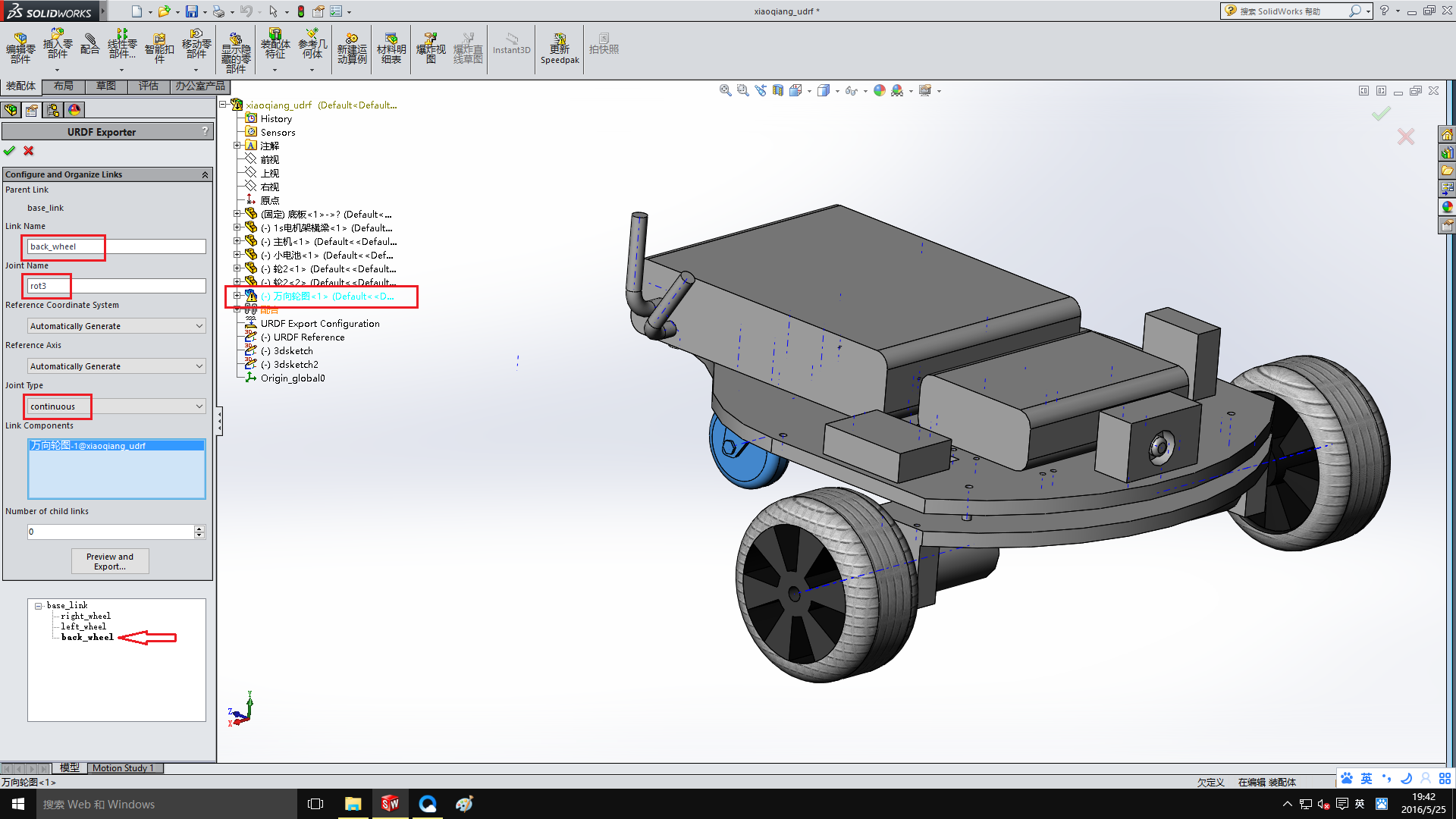
继续左轮和后轮
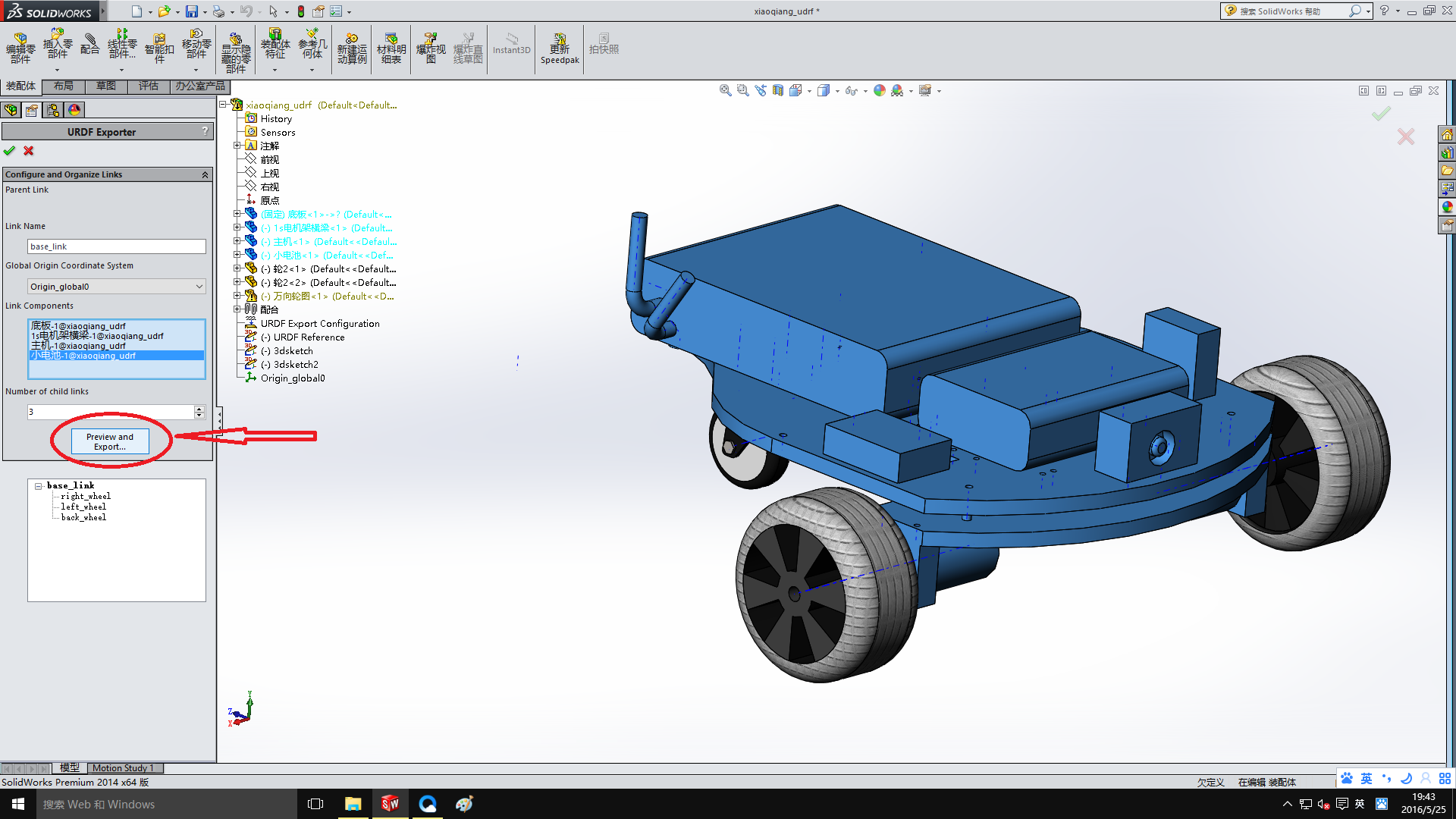
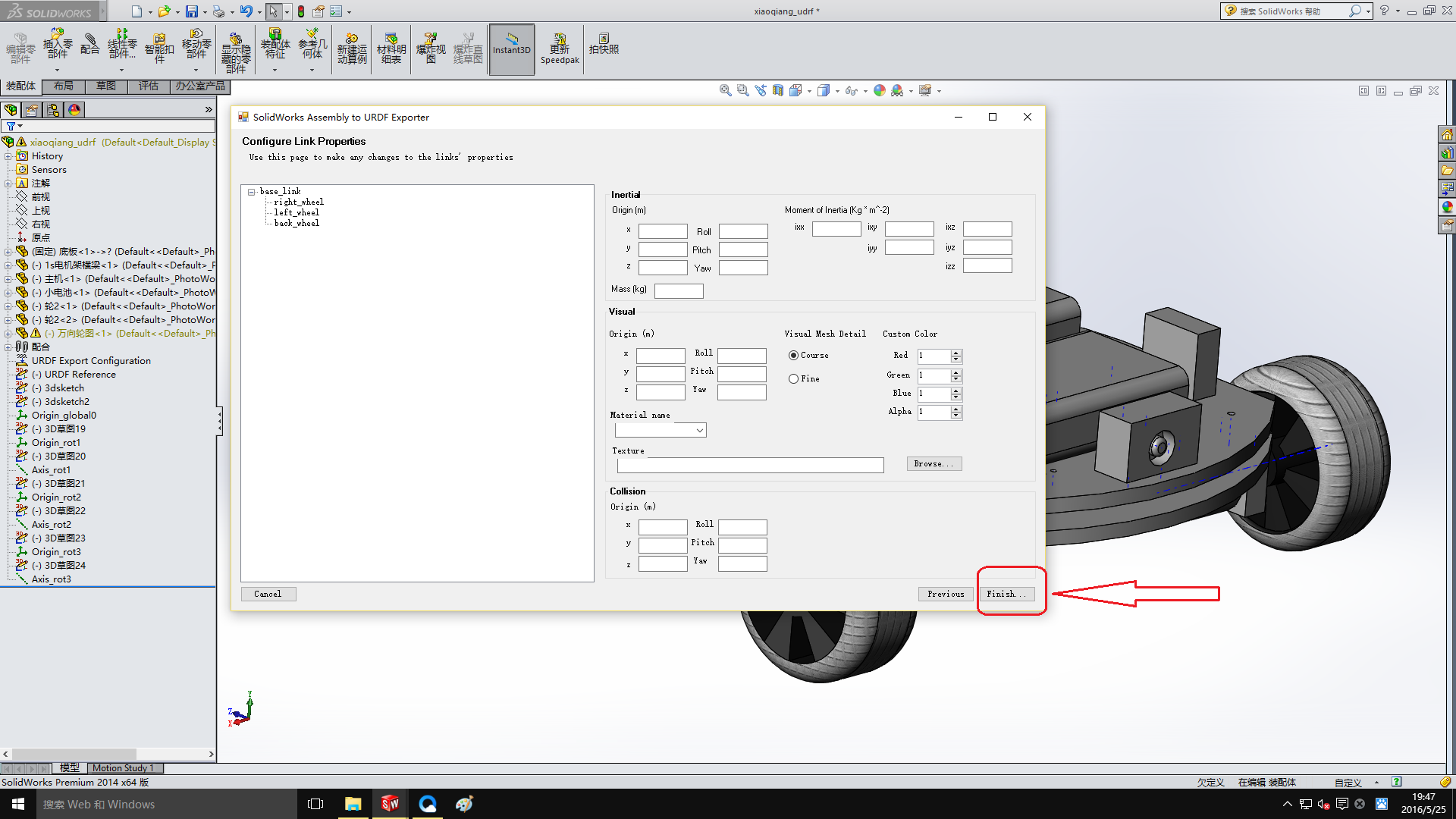
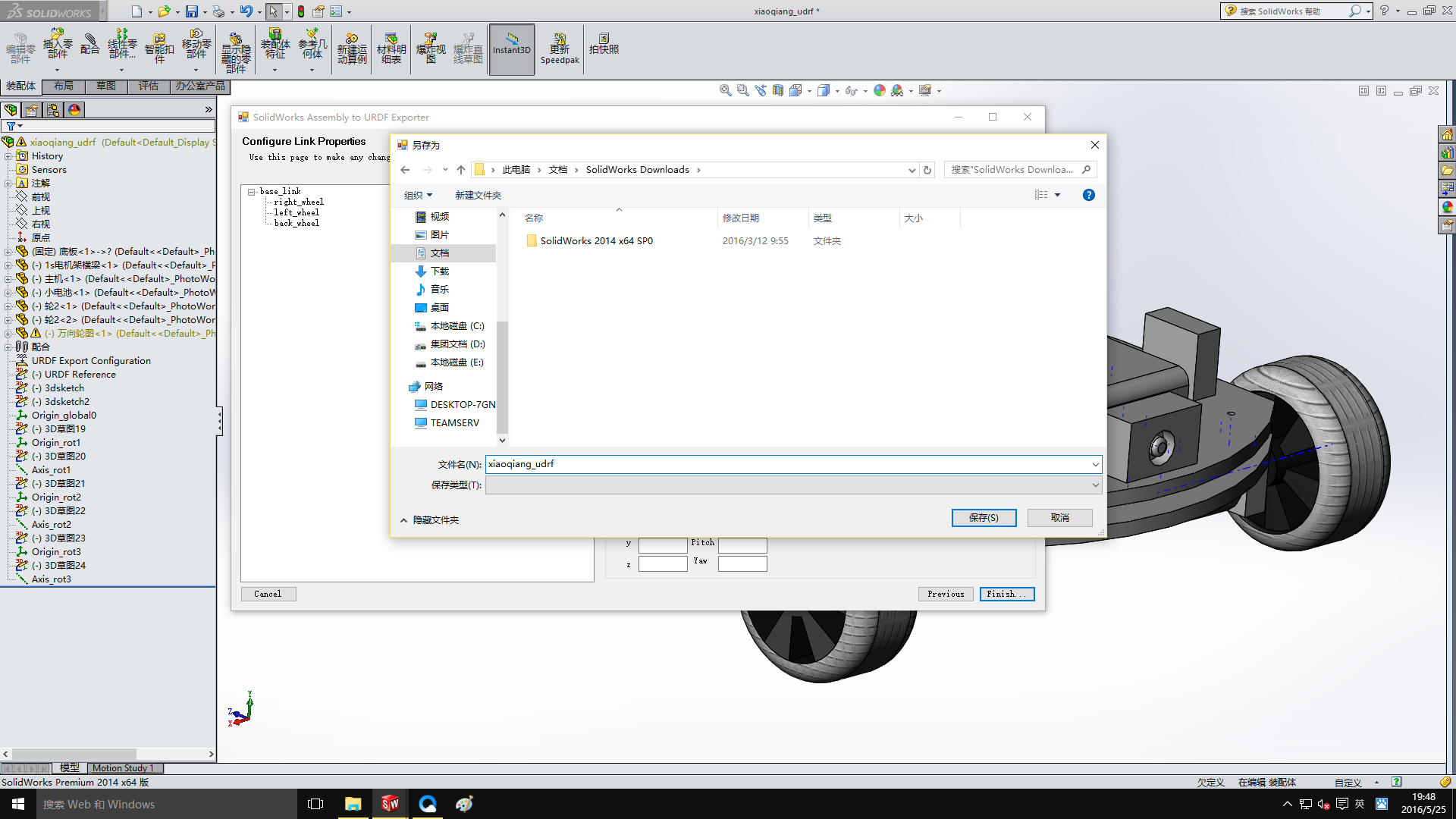
现在全部设置完成,开始导出
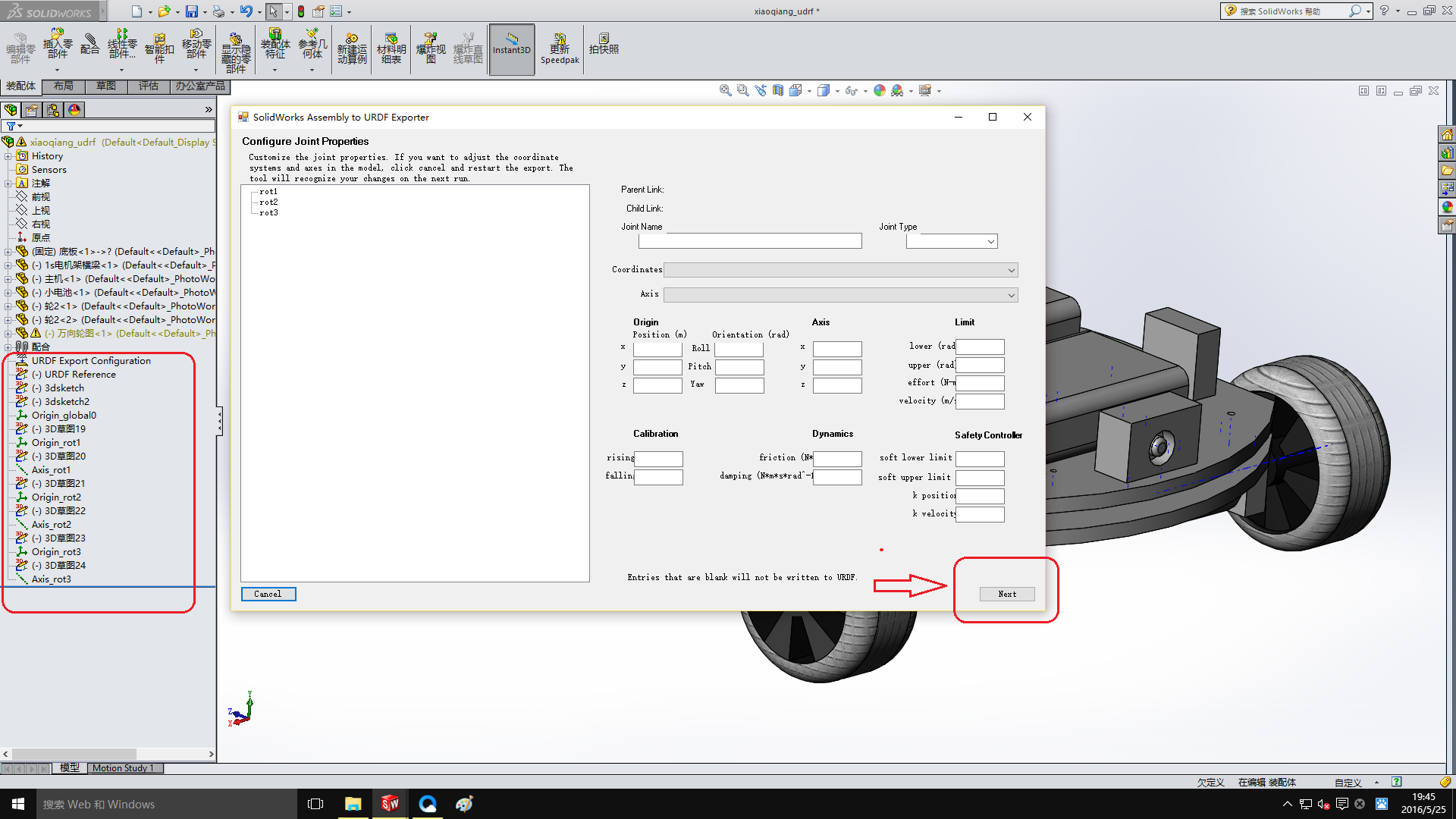
一路next和确定下去
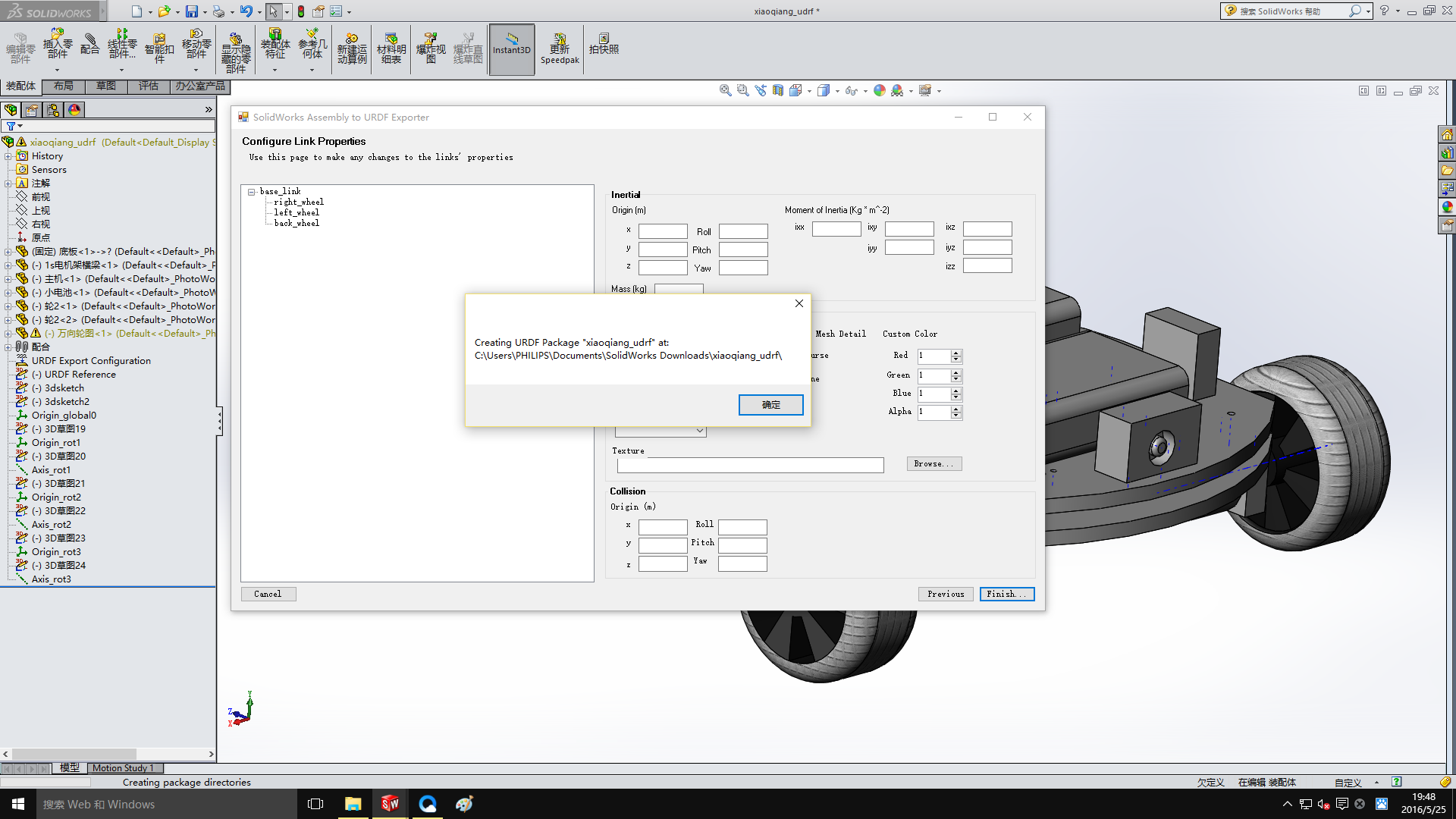
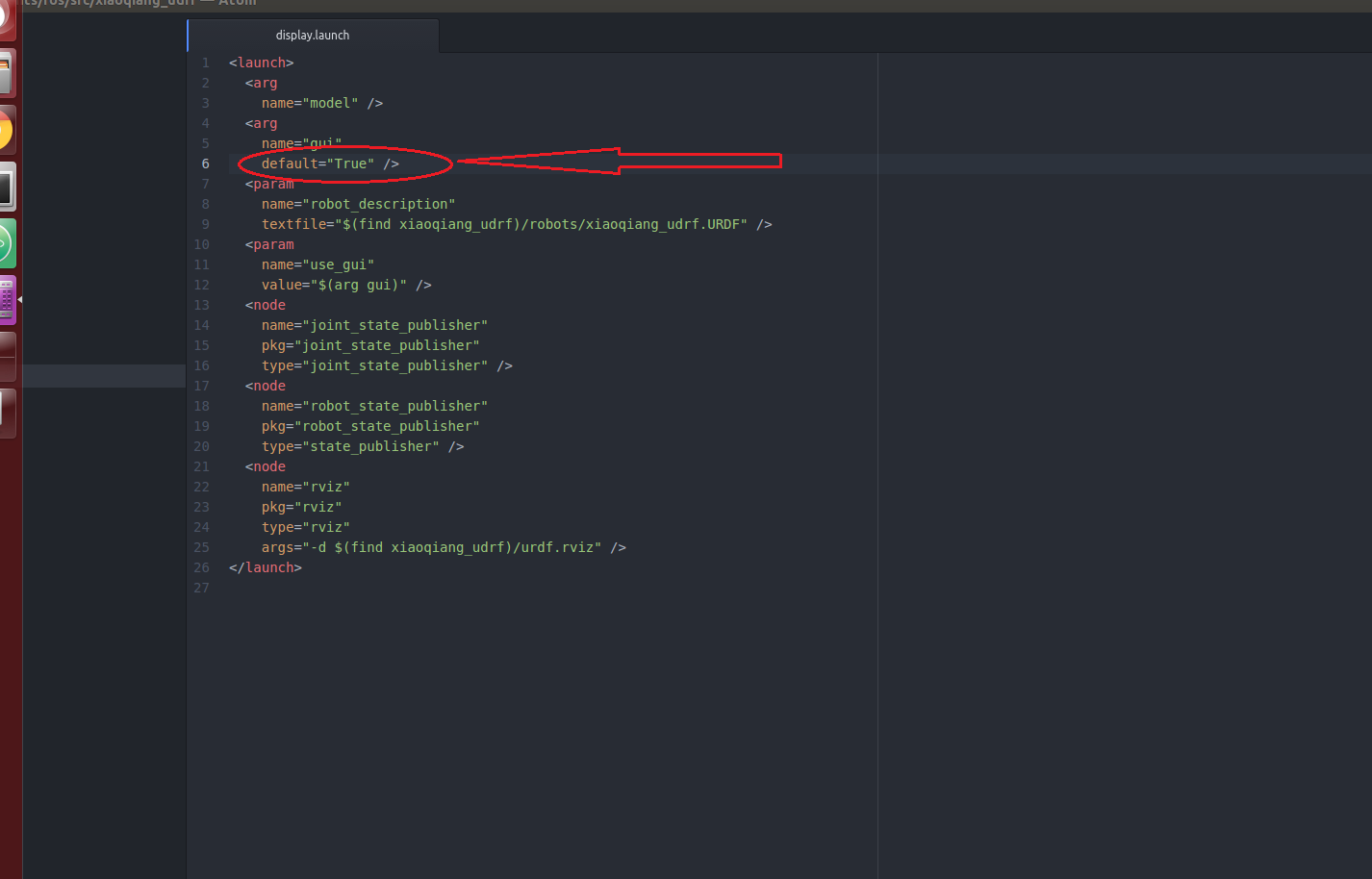
现在我们已经获到了机器人的udrf文件,生成的整个文件夹是一个ROS包, 修改launch文件夹内的display.launch文件 ,false改true
将这个ros包复制到ROS工作空间中,catkin_make编译后就可以用本文开头的方法测试使用了。