小强ROS机器人教程(12)___ROS显示kinect2代的点云
本教程适用于2016年12月之后购买的小强用户,在此之前购买的用户请自行根据这篇教程安装kinect2代驱动。
1启动kienct2代的ROS驱动
小强底盘输出一个12v电源(DC头,贴有“kinect供电”标签)用于kinect 供电,kinect2代需要插入小车主机蓝色usb3.0接口。 将小强主机接入显示器和键盘,在小强主机上打开一个命令行终端输入
roslaunch kinect2_bridge kinect2-xyz.launch
2新开1个命令行终端,启动rviz
rviz
打开这个rviz配置文件 /home/xiaoqiang/Documents/ros/src/iai_kinect2/kinect2_bridge/launch/rviz.rviz ,点击可下载本文件
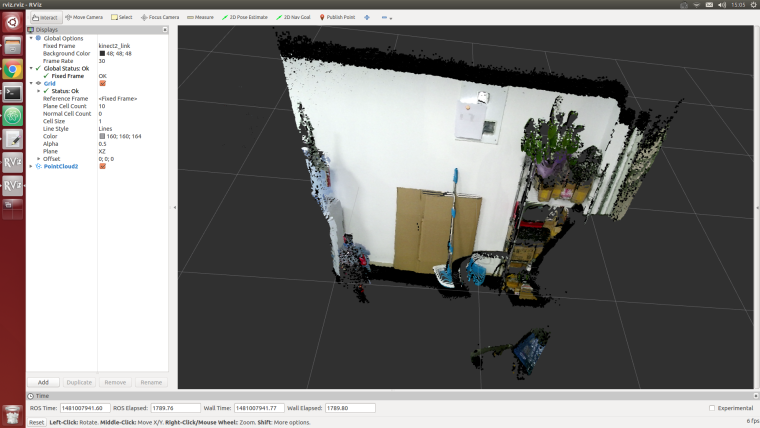
一切正常的话,可以出现类似下图的界面