小强ROS机器人教程(14)_在gmapping下使用激光雷达进行建图
1、安装gmapping,2017年3月3日之后收到货的用户可以跳过这个安装步骤,直接从步骤2开始
vnc登录小强主机,进入小强ros工作空间
cd Documents/ros/src/
下载两个ros软件包gmapping、openslam_gmapping
git clone https://gitee.com/bluewhaleRobot/slam_gmapping
git clone https://gitee.com/bluewhaleRobot/openslam_gmapping
编译、完成安装
cd ..
catkin_make
2、启动gmapping节点
确保雷达安装正确,vnc进入小强主机后启动gmapping中的launch文件
如果是rplidar a1或者a2
roslaunch gmapping slam_gmapping_xiaoqiang_rplidar_a2.launch
# 如果是rplidar a3则启动
roslaunch gmapping slam_gmapping_xiaoqiang_rplidar_a3.launch
# 如果是星秒pavo激光雷达
roslaunch gmapping slam_gmapping_xiaoqiang_pavo.launch
# 如果是镭神ls01b激光雷达
roslaunch gmapping slam_gmapping_xiaoqiang_ls01b.launch
# 如果是sc-mini激光雷达
roslaunch gmapping slam_gmapping_xiaoqiang_scmini.launch
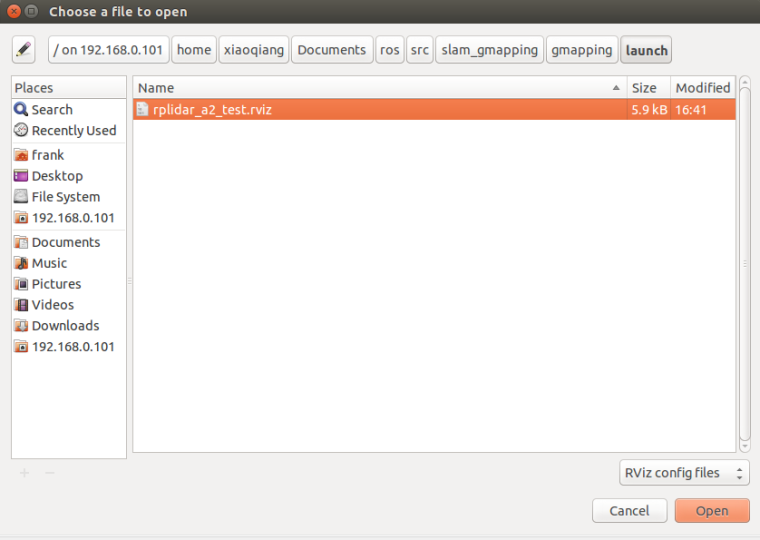
机器人打开rviz,选择打开小强ros工作目录下的slam_gmapping/gmapping/launch/rplidar_a2_test.rviz配置文件
rviz
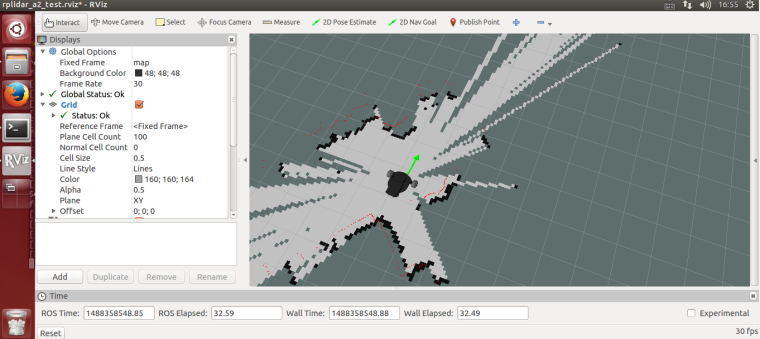
等待几秒,正常情况会出现下图的类似结果
3、遥控小强运动开始建图
第一种方式,使用windows遥控端,参考这篇帖子(小强图传遥控windows客户端)
第二种方式,使用手机app,参考这篇贴子(小强手机遥控app安卓版)
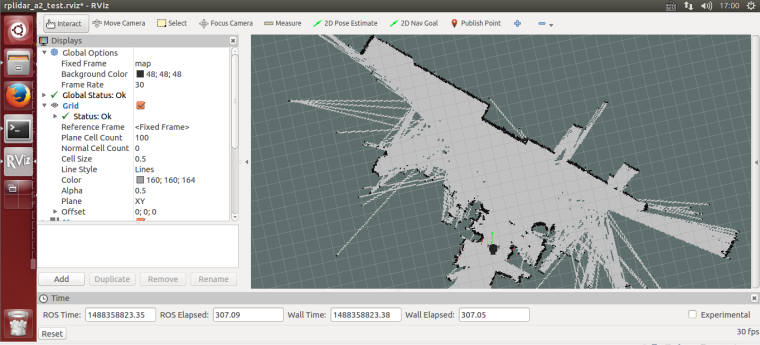
4、保存地图,本文结束
vnc登录小强,在小强home目录下保存为work0开头的文件
rosrun map_server map_saver -f work0