小强ROS机器人教程(1)_基础操作介绍
开始之前
以下的教程重点在于使用小强的各种功能,并不包含对ROS的教学。如果您是ROS的初学者,请在进行下面的教程的同时跟进学习ROS基础知识。 请不要只跟着我们的教程输入指令,要理解每一个命令的具体含义。遇到问题时也要善于自己寻找问题的原因,这些对于以后的工作学习都会很有帮助。如果您遇到了关于教程或者ROS不理解的地方也欢迎在我们ROS交流群(538456117)中提问。
首先请您自行依据线标提示将小强接线连接好,完整结构如下图所示

1.配置小强网络
使用赠送的hdmi转vga插头(小强mini可以直接使用vga),将显示器和键盘鼠标接入小强主机后开机,进入主机ubuntu系统。
小强默认密码是 xiaoqiang
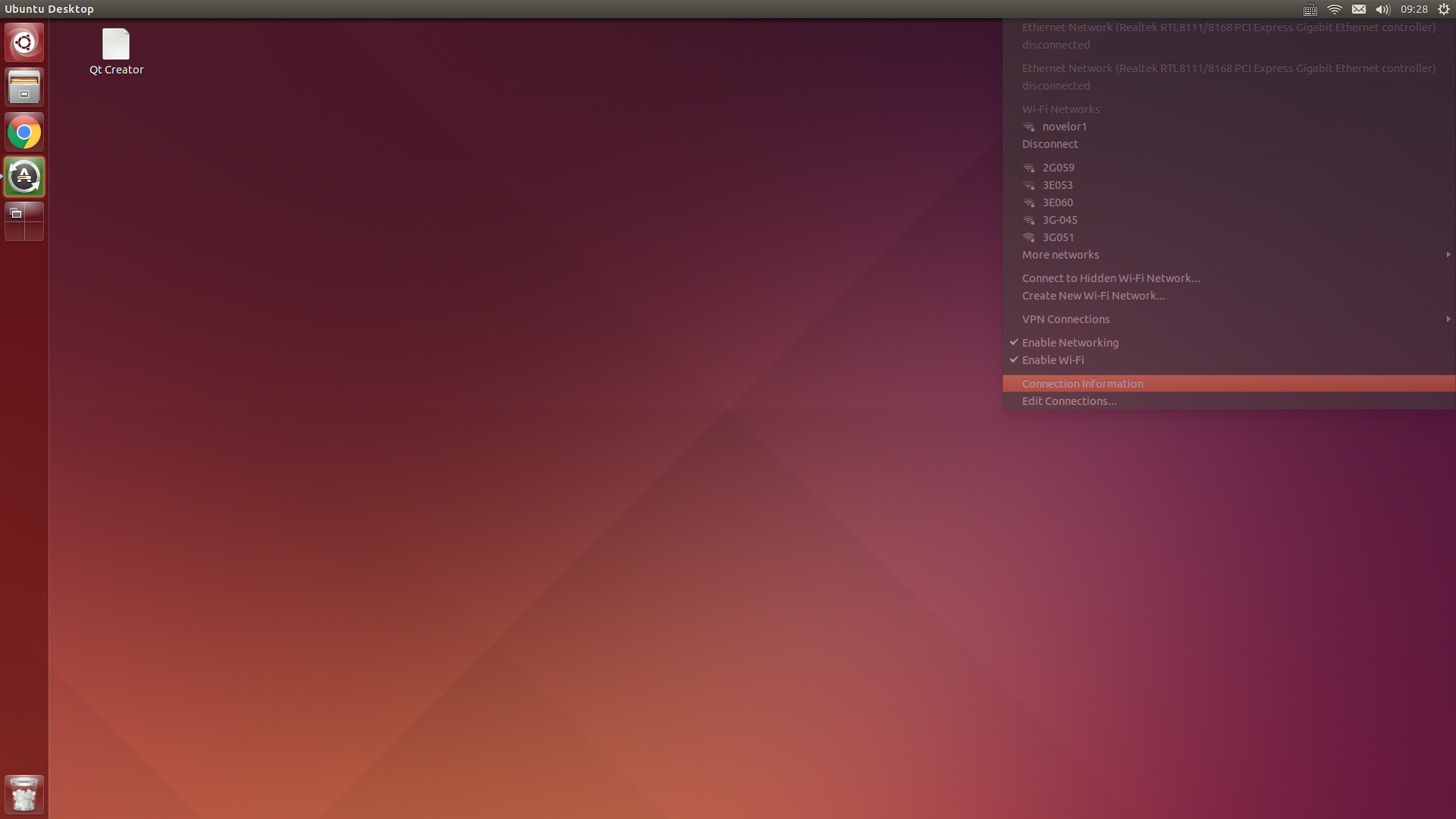
点击下图位置,选择需要接入的无线网络

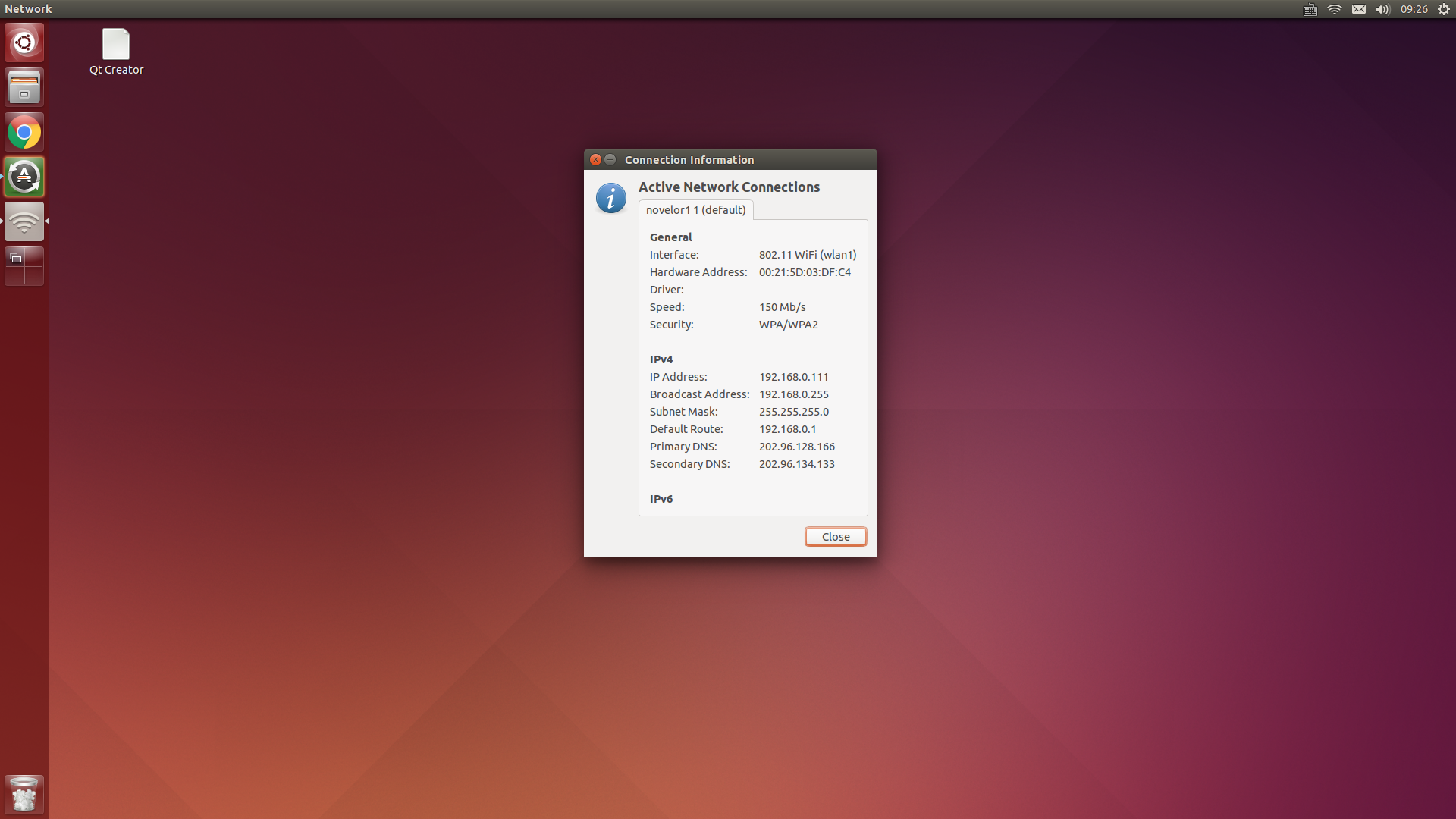
接入网络后,点击下图位置得到小强的实际ip地址,后续教程会频繁使用到这个ip信息
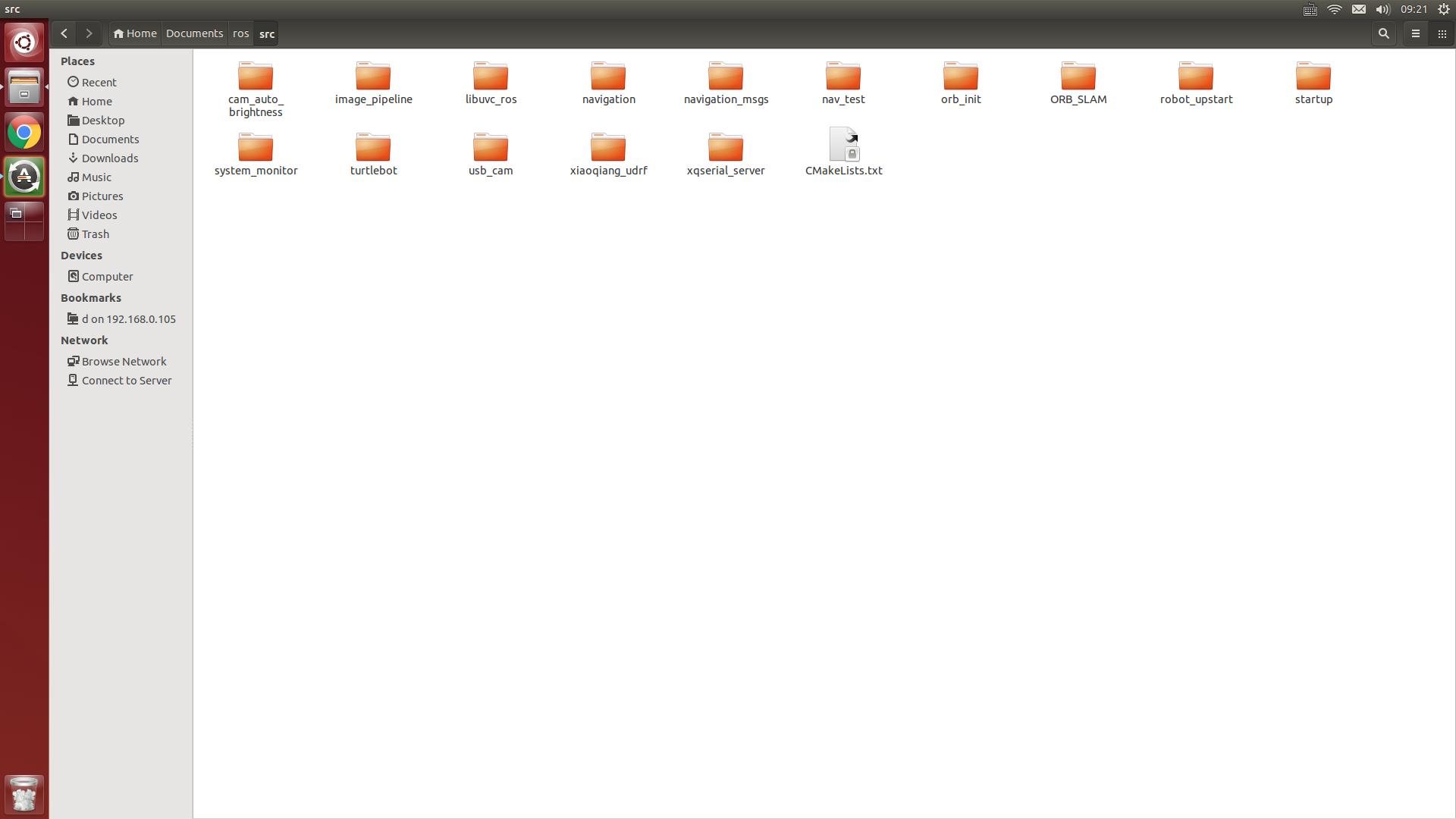
小强的ROS默认工作目录在这里
现在小强已经配置完成了,关机后拔掉键盘鼠标和显示器,下次小强直接开机就能使用
2.本地遥控端配置
由于小强安装了VNC远程桌面,本地遥控端只需要安装一个VNC Viewerhttps://www.realvnc.com/en/connect/download/viewer/即可。
同时保证本地遥控端必须和小强在同一个局域网下
后续由于需要频繁的更改机器人上的文件,建议在本地电脑上安装VSCode。同时安装ROS插件和远程连接插件。通过远程连接方便的对机器人进行修改。
现在您已经具备小强的完整开发使用条件,例如ssh登录小强主机,输出机器人当前电压
通过VNC在机器人上打开一个命令行终端,输入以下指令
rostopic echo /xqserial_server/Power
正常输入如下
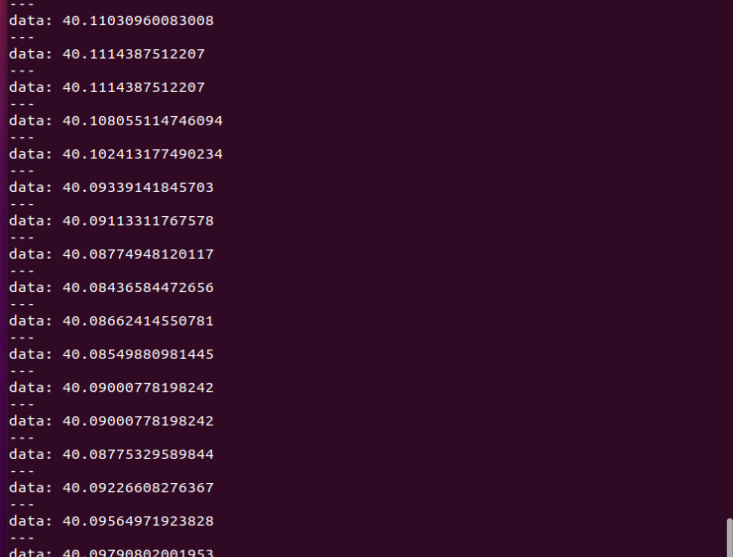
不同型号机器人的电压可能会不同。