使用depthimage_to_laserscan包将kinect深度图像转换成2d激光雷达话题
kinect 1代的驱动包freenct_stack可以输出深度图像和点云,理论上可以使用pointcloud_to_laserscan包将点云转换成scan数据,但是freenct_stack包输出的点云数据所在的坐标系不是常用的base_link坐标系,要先进行坐标变换才能转换,这导致pointcloud_to_laserscan包效率很低。
#运行下列命令可以测试pointcloud_to_laserscan包的转换功能,用“rostopic hz /kinect/scan”查看输出的/kinect/scan话题发布频率,可以发现值很低,即转换效率太低不实用
roslaunch pointclound_to_laserscan xiaoqiang_lungu_kinect.launch
下文将介绍使用depthimage_to_laserscan包将kinect深度图像转换成2d激光雷达话题的详细步骤,这种方法输出的雷达话题/kinect/scan,频率高达20HZ,满足实时性要求。
1.安装depthimage_to_laserscan包
#需要安装到ros工作空间,以小强主机为例
cd ~/Documents/ros/src
git clone https://github.com/BluewhaleRobot/depthimage_to_laserscan.git
cd ..
catkin_make
2.启动转换节点开始测试
freenct_stack驱动发布的深度图像/kinect/depth/image被 depthimage_to_laserscan节点订阅后将其转换成laserscan话题/kinect/scan,所在的frame_id则是“kinect_link”
#新开一个终端
#如果是小强xq5轮毂电机版本,请启动这个launch文件
roslaunch depthimage_to_laserscan xiaoqiang_lungu_kinect.launch
#如果是小强xq4-pro普通电机版本,请启动这个launch文件
roslaunch depthimage_to_laserscan xiaoqiang_pro_kinect.launch
#新开一个终端将kinect角度设为水平方向
rostopic pub /set_tilt_degree std_msgs/Int16 '{data: 0}' -1
正常的话,现在就可以获取10hz的laserscan类型话题数据了
#新开一个终端,查看转换后的/kinect/scan话题发布频率
rostopic hz /kinect/scan
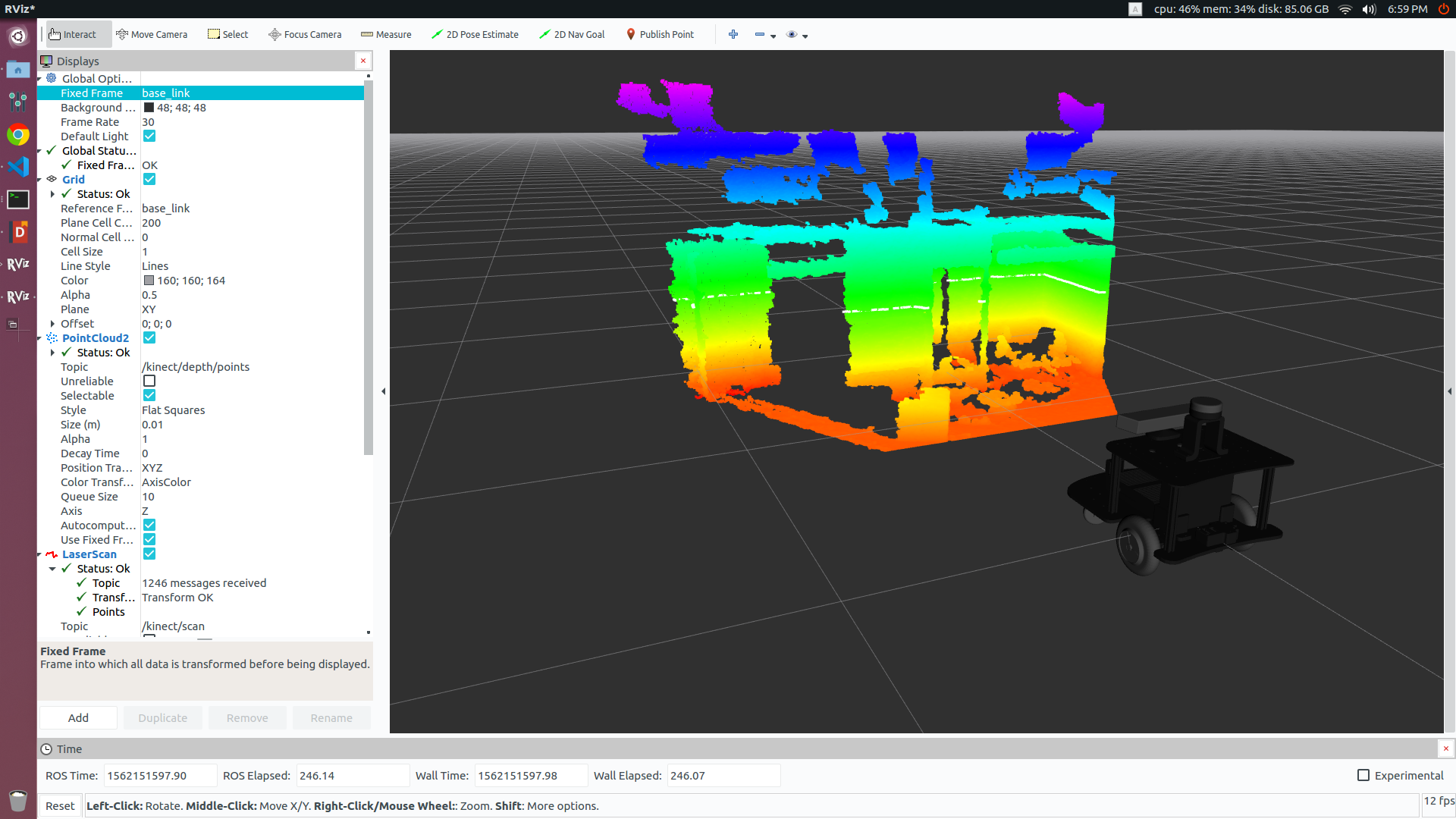
4.在rviz中查看2d雷达数据
roscd depthimage_to_laserscan/launch/
rviz -d kinect.rviz
#图中白线就是转换输出的2d雷达数据